Koheron Alpha-250 FPGA 手册(完整版)珍藏版、周年纪念版、限量版等等
0 为什么写这个
因为我们要做一个里德堡原子探头,需要用这玩意做光电信号采集处理终端。然而好像只有官方参考文档可以参考,没有其他任何包括CSDN什么的第三方资料。没事,俺可以根据官方文档和ChatGPT自己弄一个,就当是自己必须从头学起的笔记了。
1 关于 Koheron Alpha-250 FPGA
ALPHA-250是围绕Zynq 7020 SoC构建的可编程板。
Zynq 7020 SoC具有100 MHz射频前端,带有14位ADC和16位DAC,频率为250 MSPS。射频通道由一个双PLL、超低抖动时钟发生器锁时(clocked)。时钟发生器包括一个4通道24位ADC和一个4通道16位DAC。该板具有全面的开源FPGA/Linux参考设计。这个挺贵的:
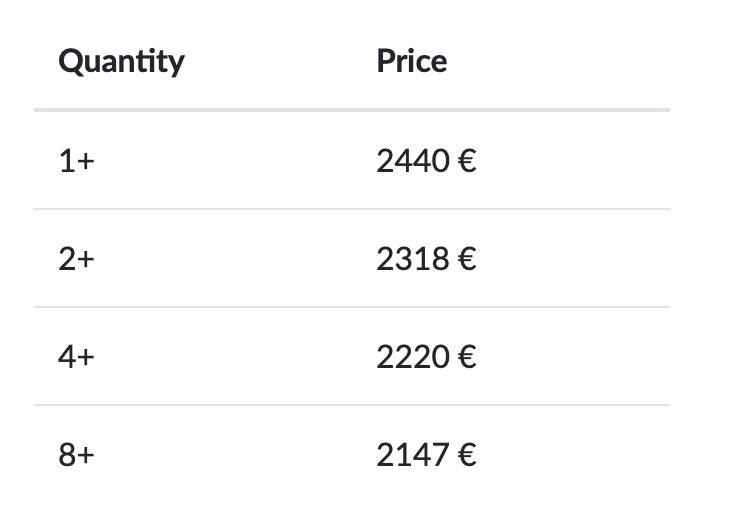
一个要快3万啦。
相关名词:
- Zynq 7020 SoC将一个ARM处理器和一个FPGA(现场可编程门阵列)集成在同一个芯片上,提供了强大的计算和信号处理能力。
- 是AMD(AMD, yes!)公司生产的,带了双核 Cortex-A9 MPCore,ARM架构的,Up to 866MHz。
- 这儿有详细的参数。不仔细研究了。
- 射频(RF)前端工作频率为100 MHz,意味着它能够处理高达100 MHz频率的信号。
- 14-bit ADCs(模数转换器),将模拟信号转换为数字信号,14位的分辨率表示它可以将模拟信号量化为 \(2^{14} = 16,384\) 个不同的级别。
- 16-bit DACs(数模转换器),将数字信号转换为模拟信号,16位的分辨率表示它可以将数字信号转换为 \(2^{16} = 65,536\)个不同的电平。
- 这两个转换器的采样速率为250 MSPS(每秒250百万次采样),表示它们每秒钟可以处理250百万个样本。
- RF通道由双PLL(锁相环)超低抖动时钟发生器提供时钟信号。抖动是指信号周期之间的微小变化,低抖动时钟可以提高系统的精度和稳定性。
- 除了RF前端的14位ADC和16位DAC外,板子还包括:
- 4 通道 24-bit ADC:更高分辨率的模数转换器,适用于需要高精度信号处理的应用。
- 4 通道 16-bit DAC:用于高精度的数模转换。
1.2 Alpha-250 FPGA 架构简介
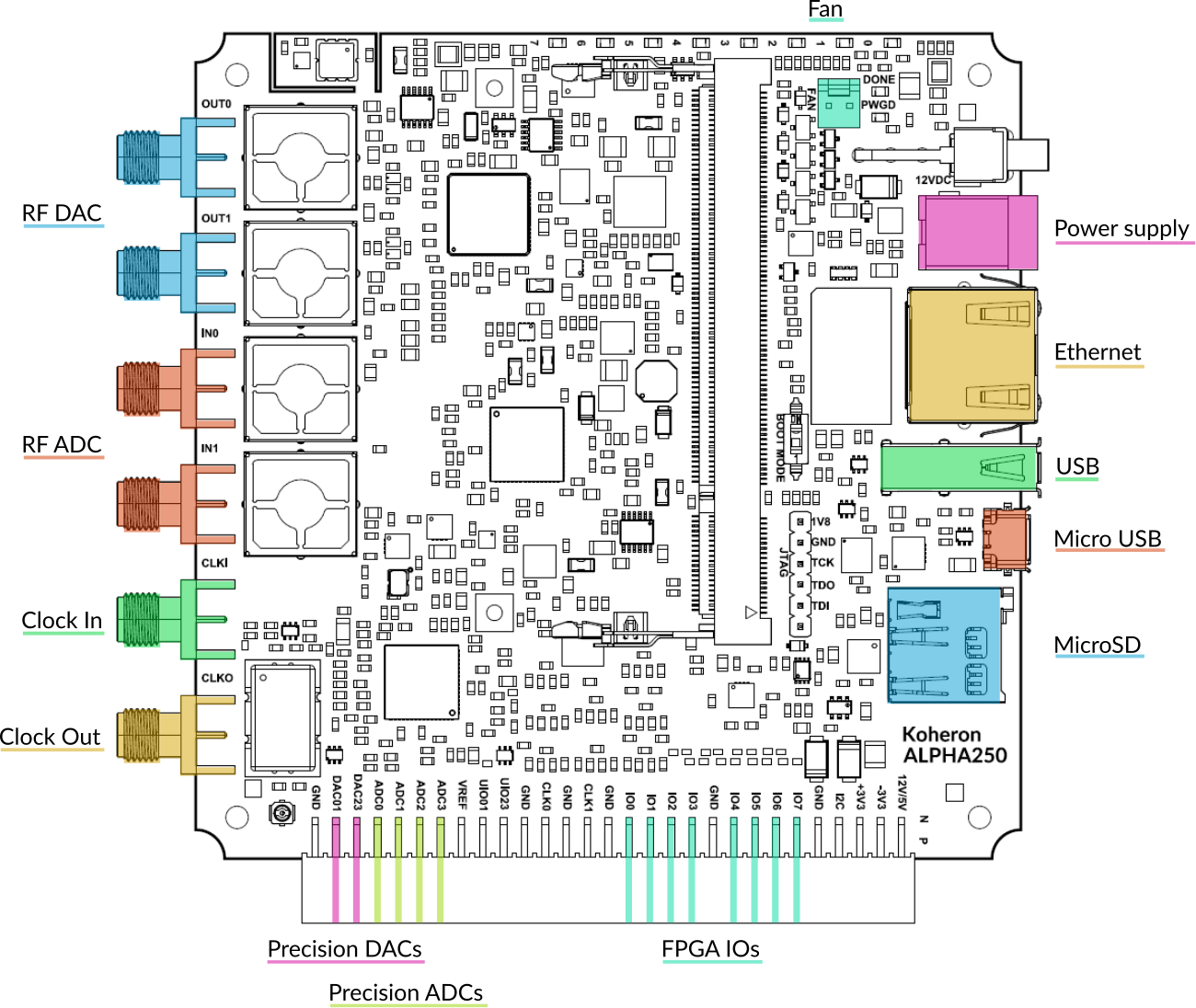
ALPHA250
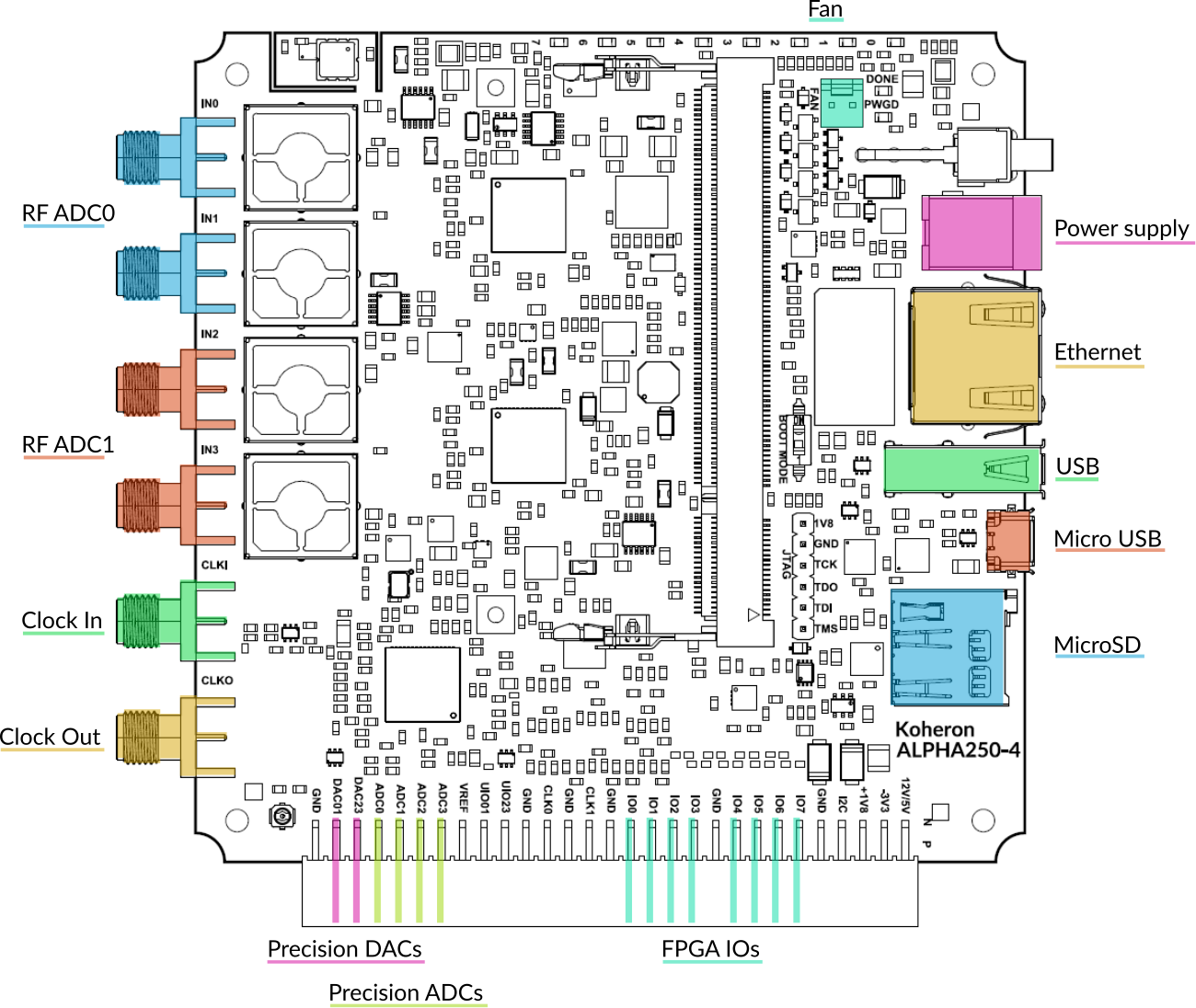
ALPHA250-4
ALPHA250-4 的采样率是 ALPHA250 的两倍,为250 MSPS,相比之下 ALPHA250 的采样率为125 MSPS。另外,ALPHA250-4 的模拟带宽是100 MHz,而 ALPHA250 的模拟带宽是50 MHz。 由于采样率和带宽的提升,ALPHA250-4 更适合需要处理更高频率信号的应用。
- 12 V外部电源
- 外部电源连接器是一个插孔,具有1.95毫米的中心引脚和6毫米的外径。 -此连接器上只能提供12V。运行ALPHA250至少需要1A。根据扩展连接器的负载,可能需要更多的电流。最大电流为3A(由保险丝保护)。
- USB 2.0
- 它在5V下提供1A的电流(与膨胀连接器的5V电源共享)。电源和数据引脚受到ESD保护。
-
电源和数据引脚是ESD(静电放电)保护的,可以防止静电引起的短路和设备损坏。
- Micro USB 2.0
- Micro USB 2.0连接与
UART0PS核心通过FTDI设备连接,这通常用于调试串行接口。电源和数据引脚受到ESD保护。 -
FTDI设备是一个USB到串行转换器,它允许USB接口与UART接口进行通信。常见的FTDI设备型号有FT232R、FT232H等。通过这种设备,可以在电脑上通过USB端口与开发板进行串行通信。
-
UART0PS(Processor System)核心是Zynq处理器中的一个串行通信接口。它允许处理器通过串口与外部设备通信,通常用于调试和控制。 -
在这种配置下,Micro USB 2.0接口通过FTDI设备连接到Zynq的
UART0PS核心,然后可以使用串口终端程序(如gtkterm或Tera Term)连接到开发板,进行调试和控制。
- Micro USB 2.0连接与
- 千兆以太网:ALPHA250能够使用10/100/1000 Mbit以太网。
- Micro SD卡:Micro SD card 通过一个电平转换器(level-shifter)连接到
SD0PS 核心. The SD card I/Os are ESD protected.-
SD0PS 核心指Zynq处理器系统(Processor System, PS)中的第一个SD控制器(SD0)。SD控制器用于与SD卡进行数据传输。 -
电平转换器(level-shifter):Zynq处理器的I/O电压为1.8V或3.3V,而MicroSD卡工作在3.3V电压下。电平转换器的作用是将处理器的I/O电平转换为SD卡所需的电平,确保两者能够正常通信。另外,电平转换器还可以提供一定的电气隔离,保护处理器和SD卡免受电压不匹配带来的潜在损害。
- 可以使用Linux命令如
lsblk或dmesg查看SD卡的挂载情况。 - 在Linux系统中挂载SD卡:
1
sudo mount /dev/mmcblk0p1 /mnt/sdcard - 弹出SD卡:
1
sudo umount /mnt/sdcard
-
- 扩展连接器
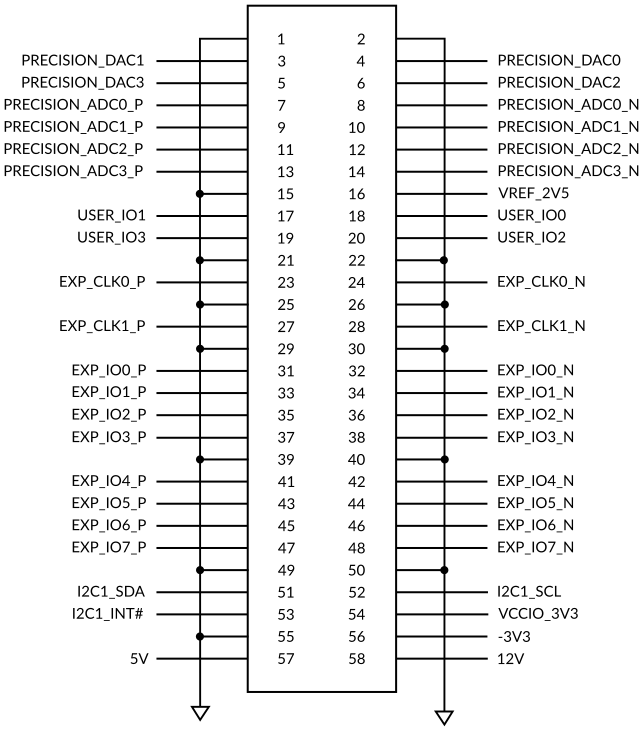
ALPHA250-4的不同就是右下角倒数第三个 VCCIO_3V3 改成了 VCCIO_1V8.
太复杂了,先不研究。Mark在这里。
1.3 Alpha-250 FPGA 子系统
1.3.1 射频ADC
射频ADC有2个采集通道,具有14位分辨率和250 Msps最大采样率(使用的是Linear Technologies的LTC2157-14 ADC芯片)。 它在SMA连接器上有两个标有IN0和IN1的输入。
- 输入是直流耦合的(输入信号可以包含直流(0 Hz)分量)
- 有50欧姆的终端匹配。为了达到最佳的DC偏置,输入信号应来自50Ω输出阻抗源。这样可以确保信号被正确地传输到ADC。
- 输入信号的峰值-峰值电压范围是1 Vpp(峰-峰值),即信号在-500 mV到500 mV之间,ADC能够正确采集和转换输入电压在这个范围内的信号。
- 输入端口配有瞬态电压抑制器(TVS),TVS会钳制超过±8 V的电压,防止输入信号过高导致ADC损坏。
- 总的流程:
- 连接信号源:将你的信号源通过SMA连接器连接到IN0或IN1输入端口。
- 匹配阻抗:确保信号源的输出阻抗为50 Ω,以优化信号传输和DC偏置。
- 信号范围:确认信号的峰-峰值范围在1 Vpp(-500 mV到500 mV)内。
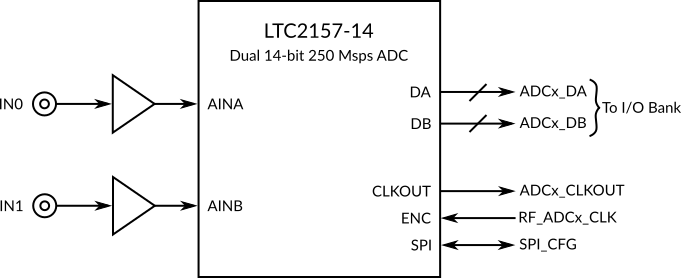
a250的射频-adc
2 操作指南
2.1 开机
首先,将micro-SD卡插入micro-SD插槽。然后连接电源的12V插孔。绿色LED(PWGD)说明通电了,橙色LED(DONE)说明FPGA完成啦。反正表示系统已正确启动。
2.2 连接板子
2.2.1 LAN
和板子连接最主要的方法就是以太网接口,就是插网线。
2.2.2 直接连电脑
从here抄的。 首先得给 Zynq 板子分配好 静态IP地址。静态IP地址确保每次设备重启或连接时,其IP地址保持不变,对于设备之间的直接通信特别重要,因为IP地址不会改变,通信双方可以始终知道如何找到对方。 ???部分讲了怎么分配静态IP地址。
- 第一步, 新建一个以太网接口。
编辑这个文件
/etc/network/interfaces1 2 3 4 5 6
iface eth0 inet static # 指定eth0接口使用静态IP地址。 address 10.42.0.42 # 为eth0接口分配静态IP地址 10.42.0.42 gateway 10.42.0.1 # 指定默认网关为 10.42.0.1 netmask 255.255.255.0 # 指定子网掩码为 255.255.255.0,即 /24。 network 10.42.0.0 # 指定网络地址为 10.42.0.0。 broadcast 10.42.0.255 # 指定广播地址为 10.42.0.255
根据自己的网络情况修改。注意两点:
- 网络ID相同:主机和Zynq板子的网络配置必须在同一个子网内。即,主机的IP地址和板子的IP地址在网络部分(如 10.42.0)必须相同,这样它们才能在同一个局域网内进行通信。
- 主机ID不同:主机的IP地址和板子的IP地址的主机部分(如 42)必须不同,以确保每个设备有唯一的IP地址,避免IP地址冲突。 例如,如果Zynq板子的IP地址是 10.42.0.10,那么主机的IP地址可以是 10.42.0.42。这两个IP地址在同一个子网内(即网络ID相同),但主机ID不同。
- 重启网络接口:
1
$ sudo ifdown eth0 && sudo ifup eth0
2.2.3 串行接口连接主机(Host)
原始文档在这儿. 串行UART调试接口可以通过micro USB连接器访问。 重要提示:先打开电路板,等待电路板启动,然后再连接串行电缆。 要在主机和Zynq板子之间设置USB串行连接,可以按照以下详细步骤操作:
- 连接串行端口到计算机USB端口
你需要一根USB转串口(UART)电缆,一端是USB接口,另一端是串口接口(通常是TTL级别的3.3V或5V,或者DB9接口)。比如可以买微雪 Waveshare 的。
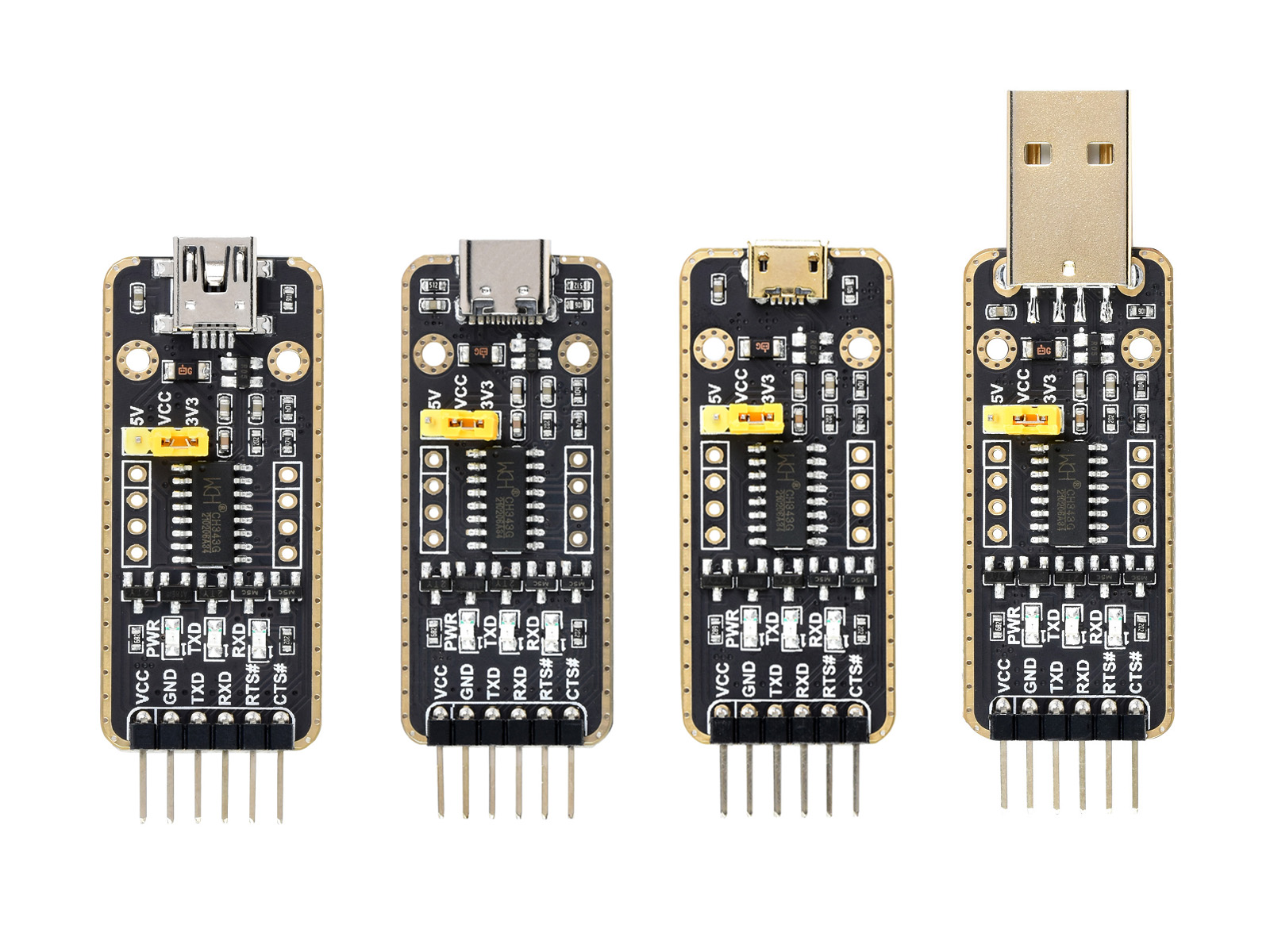 然后,将电缆的USB端插入你的计算机的USB端口,将电缆的串口端连接到Zynq板子的串行端口(通常是板子上的一个UART接口或DB9接口)。
然后,将电缆的USB端插入你的计算机的USB端口,将电缆的串口端连接到Zynq板子的串行端口(通常是板子上的一个UART接口或DB9接口)。 - 使用终端程序连接到板子
- 选择终端程序:
- Linux:可以使用
gtkterm、minicom等终端程序。 - Windows:可以使用
Tera Term、PuTTY等终端程序。
- Linux:可以使用
- 安装终端程序:
- Linux:你可以使用包管理器安装
gtkterm。例如,在Ubuntu上:1
sudo apt-get install gtkterm
- Windows:下载并安装
Tera Term,可以在Tera Term官网找到安装程序。
- Linux:你可以使用包管理器安装
- 选择终端程序:
- 编辑波特率和选择端口
- 波特率设置:
- 打开终端程序(如
gtkterm或Tera Term)。 - 在终端程序中,找到串口设置选项(通常在“设置”或“配置”菜单下)。
- 将波特率设置为
115200。这通常是Zynq板子的默认通信速度。 - 波特率(Baud rate)是指在数据通信中,每秒钟传输的符号(信号变化)的次数。“波特”(Baud),通常表示为每秒多少比特(bits per second, bps)。对于现代串行通信来说,波特率通常等同于比特率,即每秒钟传输的比特数。
- 打开终端程序(如
- 选择端口:
- 在终端程序中,选择正确的串口端口。你需要找到计算机识别的串口端口名称。
- Linux:串口设备通常以
/dev/ttyUSB0或/dev/ttyACM0等形式出现。你可以使用命令dmesg | grep tty来查找。 - Windows:串口设备通常显示为
COM3、COM4等。你可以在设备管理器中查看端口名称。
- Linux:串口设备通常以
- 在终端程序中,选择正确的串口端口。你需要找到计算机识别的串口端口名称。
- 波特率设置:
- 重启板子 按下Zynq板子的复位按钮或断电后重新上电。
通过以上步骤,你应该能够在终端程序中看到Zynq板子的启动信息和控制台输出,并能够与板子进行交互。这种连接方式通常用于调试和监控板子的运行状态。
Koheron OS 的安装
Koheron OS 是个定制的 Ubuntu 22.04 操作系统(或者说,Linux发行版),专门为用于Xilinx Zynq平台上的开发和运行优化过。
下载地址:从这儿可以下载镜像。
初始账号密码: Login is “root”, password is “changeme”.
PS: Koheron OS 用的是 动态IP地址 模式。
安装 Vivado HLx
Vivado HLx (High-Level Synthesis) 是Xilinx 公司发布的FPGA硬件设计工具套件的一部分,用来简化和加速FPGA设计的开发过程。
它叫高层次综合 (High-Level Synthesis),是因为它支持使用高级编程语言(如C、C++和SystemC)进行硬件设计。它可以将这些高级语言的代码转化为硬件描述语言(HDL)代码,然后将DHL代码综合为可以在FPGA上实现的网表,最后将网表映射到FPGA资源上,并进行布局布线,生成用于FPGA编程的比特流文件。
从这儿可以下载2017.2版本。
下载之后,需要安装 Xilinx Vivado SDK 2017.2 在Koheron OS(算是Linux)上。打开一个Terminal然后Run:
1
2
$ chmod +x Xilinx_Vivado_SDK_2017.2_0616_1_Lin64.bin # 赋予执行权限。chmod +x命令把 .bin(二进制可执行文件) 文件设置为可执行文件。注意根据下载版本进行调整2017.2。
$ sudo ./Xilinx_Vivado_SDK_2017.2_0616_1_Lin64.bin # sudo 是超级用户(root)权限,后面是运行安装包文件,然后写入系统目录和进行配置。
之后,第一个Select Edition to Install
Koheron OS 中找到 Zynq 的动态IP地址
动态IP地址,表示这个IP地址是动态分配的,通过DHCP(动态主机配置协议)从路由器或DHCP服务器动态获取的。
每次设备连接到网络时,DHCP服务器会从一个可用IP地址池中分配一个IP地址给设备。这种方式的优点是管理方便,特别是对于大量设备的网络。
动态IP地址可能会变化,每次连接到网络时,设备会获得不同的IP地址。
静态IP地址是手动配置的,管理员在设备上直接设置IP地址。这种方式确保设备始终使用相同的IP地址,适用于需要固定IP地址的设备,如服务器、网络打印机等。
首先:
- 板子安了 Koheron OS 了
- 板子通过 本地路由器 连接到局域网了。
然后!
输入命令:
1
$ ip addr show | grep -w inet | grep eth
这是一个在Linux系统中常用的Shell命令组合。
第一个
ip addr show意思是显示所有网络接口的详细信息,包括IP地址、MAC地址等。第二个
grep -w inet意思是从ip addr show的输出中筛选出包含inet的行。inet表示IPv4地址(如果想查看IPv6地址则是inet6)。-w选项确保只匹配完整的单词inet,而不是那些包含类似inet字符的单词。
grep eth进一步从包含inet的行中过滤出包含eth的行,eth通常是以太网接口的前缀(例如eth0,eth1等)。组合在一起用于快速查找以太网接口的IPv4地址信息。
会出现(例如):
1
inet 192.168.1.11/24 brd 192.168.1.255 scope global dynamic eth0
网络接口 eth0 的IPv4地址是 192.168.1.11
子网掩码是 /24(表示子网掩码为 255.255.255.0。这个掩码意味着网络部分是前24位,即 192.168.1 ,主机部分是后8位。)
brd表示广播地址。广播地址用于向子网上的所有主机发送消息。广播地址是 192.168.1.255,且作用域(scope)是 global,是全局可路由的,即可以在整个网络范围内使用。
Here, the IP地址的 network ID(网络部分) is 192.168.1.
然后主机部分的ID,一个8位的2进制数显示在板子的8个LED灯上,亮就是1,不亮就是0.
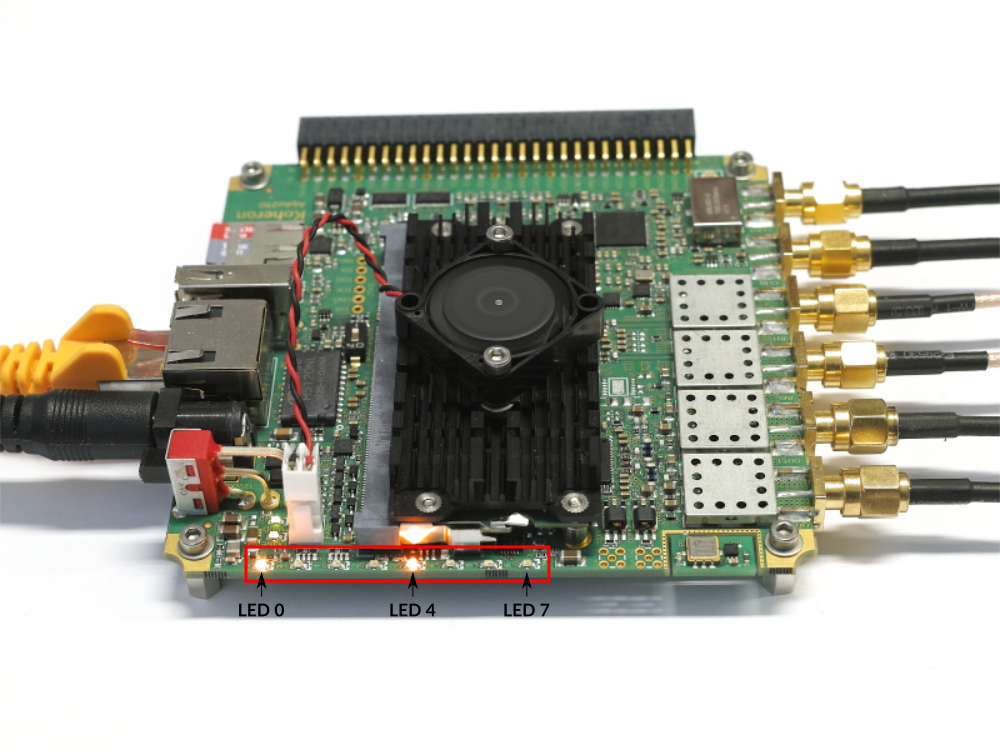
10001000,就是17.
最后动态IP等于网络部分加主机部分 = 192.168.1.17.
用 Koheron OS 给 Zynq board 分配 静态IP地址
在 Koheron OS 中,找到/etc/network/interfaces文件,注释掉这一行 face eth0 inet dhcp (这是用于设置DHCP的)
# iface eth0 inet dhcp
然后Uncomment掉底下 Static IP configuration lines,注意要按照自己的网络配置修改一下。
1
2
3
4
5
6
iface eth0 inet static
address 10.42.0.100 # 广播 IP address
gateway 10.42.0.1
netmask 255.255.255.0
network 10.42.0.0
broadcast 10.42.0.255
##
Software Development Kit | Koheron SDK
Koheron 软件开发工具包(SDK)是一个简化Xilinx Zynq®板嵌入式开发工具。它很方便地实现了硬件(FPGA)开发和软件(Linux C++驱动程序)开发之间的同步。
1
2
3
$ git clone https://github.com/Koheron/koheron-sdk.git
$ cd koheron-sdk
$ make setup
Python API
我们可以用Python编程来控制Koheron。
首先得在Koheron OS里安装Python和相应的Python库。
1
2
3
$ sudo apt-get install python-pip
$ pip install --upgrade koheron
$ pip install numpy
然后想要在Python中向板子发送命令的话,板子需要:
- 其Python驱动程序与仪器C++驱动程序一致;
- 连接到仪器的Python应用程序。
基本的控制程序可以从Koheron Python的GitHub网页上pull下来。其中最重要的是connect函数:
connect(host, instrument_name)
它能创建一个客户端对象(弹出来一个窗口),并通过TCP(传输控制协议,一种网络通信协议)连接到仪器上。
Python驱动程序的名称如下:
1
2
3
4
5
6
7
from koheron import connect
from led_blinker import LedBlinker
client = connect('192.168.1.100', 'led-blinker')
driver = LedBlinker(client)
print(driver.get_forty_two())